В качестве датчиков частоты вращения в системах автоматики применяют тахогенераторы - маломощные электрические машины постоянного и переменного тока. Для преобразования частоты вращения электродвигателей в напряжение применяют тахометрические мосты.

2.1 |
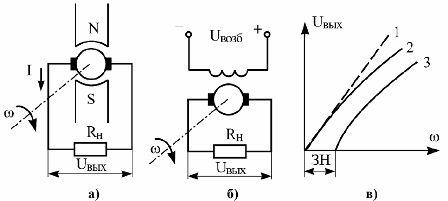
Тахометрический генератор постоянного тока |
2.2 |
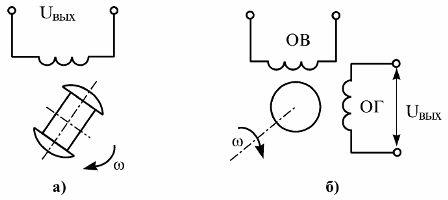
Тахометрические генераторы на переменном токе |
2.3 |
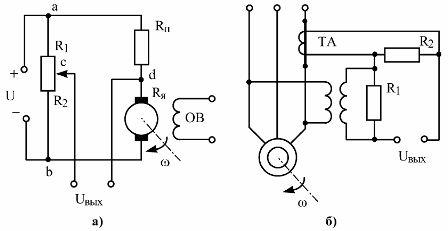
Тахометрические мосты |
2.4 |
Импульсные тахометры угловой скорости |
2.5 |
Датчики с переменным магнитным сопротивлением |
2.6 |
Датчики на токах Фуко |
2.7 |
Оптический тахометр |